 |
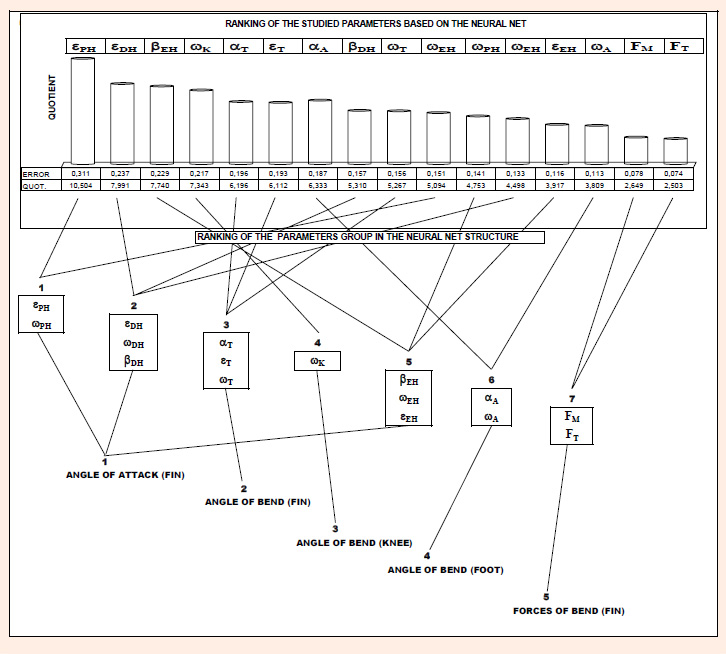
Figure 3.
Results of the network sensitivity analysis according to ranking of the standard deviation quotient against output variable (horizontal swimming velocity) which allow ordering of the parameters together into groups of features, techniques of monofin and the leg movements. These parameters were used for constructing a functonal model of monofin swimming technique. Angles of flexion: on the monofin’s tail – (a); monofin’s middle – (a); knee joints – (a); shin-ankle joints – (a). Angular velocities of flexion monofin’s tail – (w); monofin’s middle - (w); knee joints (w) and shin-ankle joints - (w) Angular accelerations of flexion monofin’s tail – (e); monofin’s middle - (e); knee joints - (e) and shin-ankle joints (e). Angles of attack of the monofin: entire surface – (b); proximal part – (b); and distal part – (b). Angular velocities of attack: entire surface - (w); proximal part - (w); distal part (w) Angular accelerations of attack: entire surface - (e); proximal part- (e); and distal part (e). Water resistance forces reacting on the monofin: forces flexing the tail (F); forces flexing the middle (F).