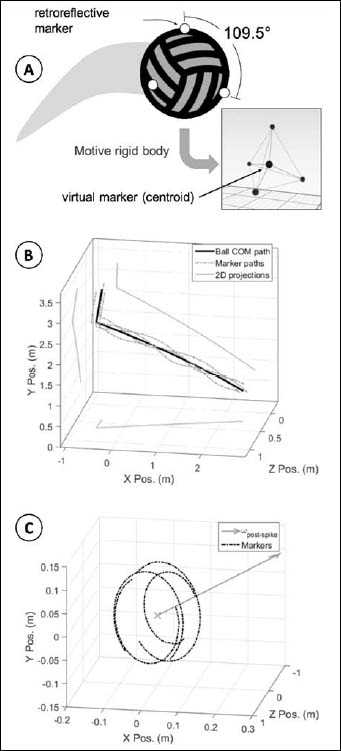
Figure 2. a) A ball with tetrahedral markers can be tracked as a rigid body, with a virtual centroid marker. b) In the <XYZ>frame the COM follows a rigid body projectile path in 3D space while the surface markers rotate about the centroid. c) When the path of the markers is considered in the <xyz>frame they trace circular paths with an angular velocity described by the vector.