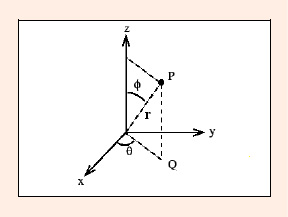
Figure 4.
The vectoral representation of the unity vector (r=[sin(Ф).cos(θ¸) , sin(Ф).sin(θ¸) , cos(Ф)]) on the orthogonal x, y and z axis.