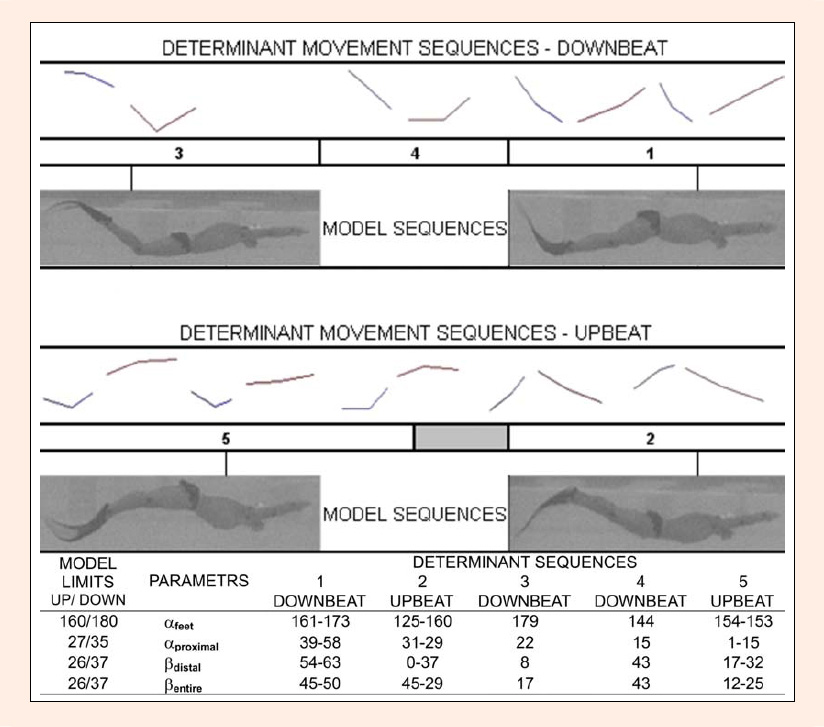
Figure 6. A determinant sequence of leg and monofin movements (1,2,3,4,5), created on the basis of errors objectively estimated from the functional model of monofin swimming technique (Rejman and Ochman, 2009). The values of the angles describing mutual position of the segments of legs and monofin are printed bellow.