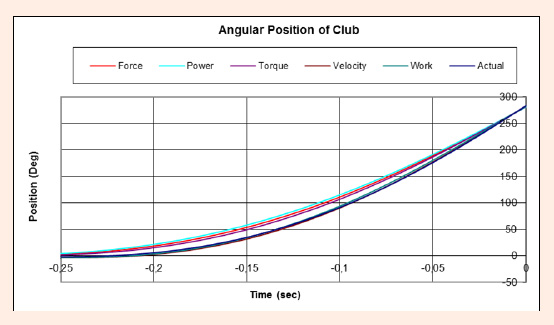
Figure 9.
Kinetic optimized swing trajectories for subject 1.